
第六章伺服控制系统
第一节概述
伺服控制系统是一种能够跟踪输入的指令信号进行动作,从而获得精确的位置、速度及动力
输出的自动控制系统。如防空雷达控制就是一个典型的伺服控制过程,它是以空中的目标为输入
指令要求,雷达天线要一直跟踪目标,为地面炮台提供目标方位;加工中心的机械制造过程也是
伺服控制过程,位移传感器不断地将刀具进给的位移传送给计算机,通过与加工位置目标比较,
计算机输出继续加工或停止加工的控制信号。绝大部分机电一体化系统都具有伺服功能,机电一
体化系统中的伺服控制是为执行机构按设计要求实现运动而提供控制和动力的重要环节。
一、伺服系统的结构组成
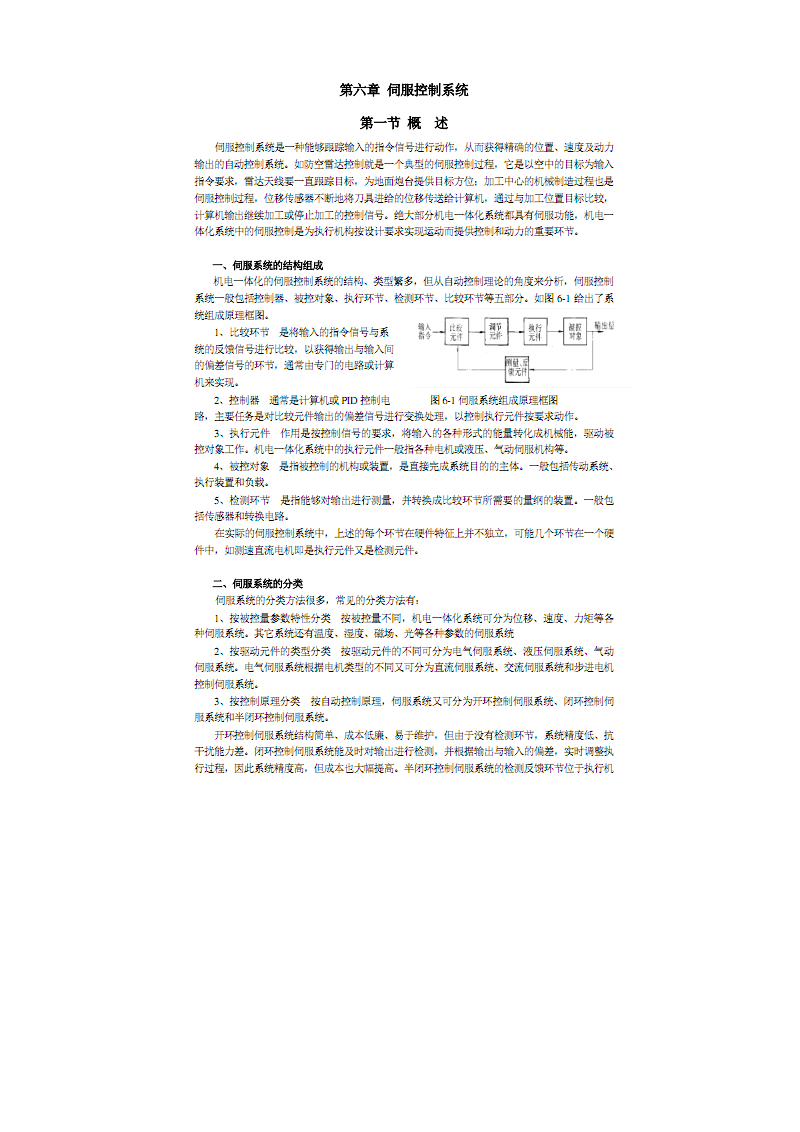
机电一体化的伺服控制系统的结构、类型繁多,但从自动控制理论的角度来分析,伺服控制
系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。如图6-1给出了系
统组成原理框图。
1、比较环节是将输入的指令信号与系
统的反馈信号进行比较,以获得输出与输入间
的偏差信号的环节,通常由专门的电路或计算
机来实现。
2、控制器通常是计算机或PID控制电图6-1伺服系统组成原理框图
路,主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
3、执行元件作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被
控对象工作。机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等。
4、被控对象是指被控制的机构或装置,是直接完成系统目的的主体。一般包括传动系统、
执行装置和负载。
5、检测环节是指能够对输出进行测量,并转换成比较环节所需要的量纲的装置。一般包
括传感器和转换电路。
在实际的伺服控制系统中,上述的每个环节在硬件特征上并不独立,可能几个环节在一个硬
件中,如测速直流电机即是执行元件又是检测元件。
二、伺服系统的分类
伺服系统的分类方法很多,常见的分类方法有:
1、按被控量参数特性分类按被控量不同,机电一体化系统可分为位移、速度、力矩等各
种伺服系统。其它系统还有温度、湿度、磁场、光等各种参数的伺服系统
2、按驱动元件的类型分类按驱动元件的不同可分为电气伺服系统、液压伺服系统、气动
伺服系统。电气伺服系统根据电机类型的不同又可分为直流伺服系统、交流伺服系统和步进电机
控制伺服系统。
3、按控制原理分类按自动控制原理,伺服系统又可分为开环控制伺服系统、闭环控制伺
服系统和半闭环控制伺服系统。
开环控制伺服系统结构简单、成本低廉、易于维护,但由于没有检测环节,系统精度低、抗
干扰能力差。闭环控制伺服系统能及时对输出进行检测,并根据输出与输入的偏差,实时调整执
行过程,因此系统精度高,但成本也大幅提高。半闭环控制伺服系统的检测反馈环节位于执行机
构的中间输出上,因此一定程度上提高了系统的性能。如位移控制伺服系统中,为了提高系统的
动态性能,增设的电机速度检测和控制就属于半闭环控制环节。
三、伺服系统的技术要求
机电一体化伺服系统要求具有精度高、响应速度快、稳定性好、负载能力强和工作频率范围
大等基本要求,同时还要求体积小、重量轻、可靠性高和成本低等。
1、系统精度
伺服系统精度指的是输出量复现输入信号要求的精确程度,以误差的形式表现,即动态误差、
稳态误差和静态误差。稳定的伺服系统对输入变化是以一种振荡衰减的形式反映出来,振荡的幅
度和过程产生了系统的动态误差;当系统振荡衰减到一定程度以后,我们称其为稳态,此时的系
统误差就是稳态误差;由设备自身零件精度和装配精度所决定的误差通常指静态误差。
2、稳定性
伺服系统的稳定性是指当作用在系统上的干扰消失以后,系统能够恢复到原来稳定状态的能
力;或者当给系统一个新的输入指令后,系统达到新的稳定运行状态的能力。如果系统能够进入
稳定状态,且过程时间短,则系统稳定性好;否则,若系统振荡越来越强烈,或系统进入等幅振
荡状态,则属于不稳定系统。机电一体化伺服系统通常要求较高的稳定性。
3、响应特性
响应特性指的是输出量跟随输入指令变化的反应速度,决定了系统的工作效率。响应速度与
许多因素有关,如计算机的运行速度、运动系统的阻尼、质量等。
4、工作频率
工作频率通常是指系统允许输入信号的频率范围。当工作频率信号输入时,系统能
免费下载链接
飞猫云链接地址:https://jmj.cc/s/ii2360
压缩包解压密码:res.99hah.com_QO66QQRkas
下载方法:如果您不是飞猫云会员,请在下载页面滚动到最下方,点击“非会员下载”,网页跳转后再次滚动到最下方,点击“非会员下载”。
解压软件:Bandizip
- 打开飞猫云链接地址的页面,拖动到最下方,找到“非会员下载”的按钮并点击
- 此时,如果没登录,可能会提醒您注册帐号,随便注册一个帐号并登录
- 再在新打开的下载页面,再次拖动到最下方,找到“网页端 非会员下载”的按钮并点击。
版权声明:本文为转载文章,版权归原作者所有,转载请保留出处!